





© 2024 EasyEDA Some rights reserved ISO/IEC
Editor Version
×
Standard
1.Easy to use and quick to get started
2.The process supports design scales of 300 devices or 1000 pads
3.Supports simple circuit simulation
4.For students, teachers, creators
Profession

1.Brand new interactions and interfaces
2.Smooth support for design sizes of over 5,000 devices or 10,000 pads
3.More rigorous design constraints, more standardized processes
4.For enterprises, more professional users
Ongoing
STD RedBot Sensor - Wheel Encoder (Open hardware)
Mode: Editors' pick
- 0
Update time:
2015-12-31 07:44:07
Creation time:
2015-12-22 02:26:43
Description
Description: Knowing where your robot is can be very important! The RedBot Wheel Encoder allows you to track the number of revolutions each wheel has made. This sensor works by detecting the movement of small teeth connected to a motor through the reflection of infrared light. By measuring the amount of reflected infrared light you can tell not only how far each wheel has traveled but how fast the wheels are turning.
The encoder has a 6-pin header which connects directly to the RedBot Mainboard via female to female jumper wires. Use the included RedBot library to start detecting wheel measurments. Two mounting holes lets you easily connect this sensor to your robot chassis.
Features:
5VDC operating voltage
2x Mounting Holes
2 Digital Outputs
Non-Quadrature
[GitHub][1]
Sparkfun link:https://www.sparkfun.com/products/12617
![enter image description here][2]
[1]: https://github.com/sparkfun/Magician_Encoder
[2]: /editor/20151231/5684dcb9e1ce0.png
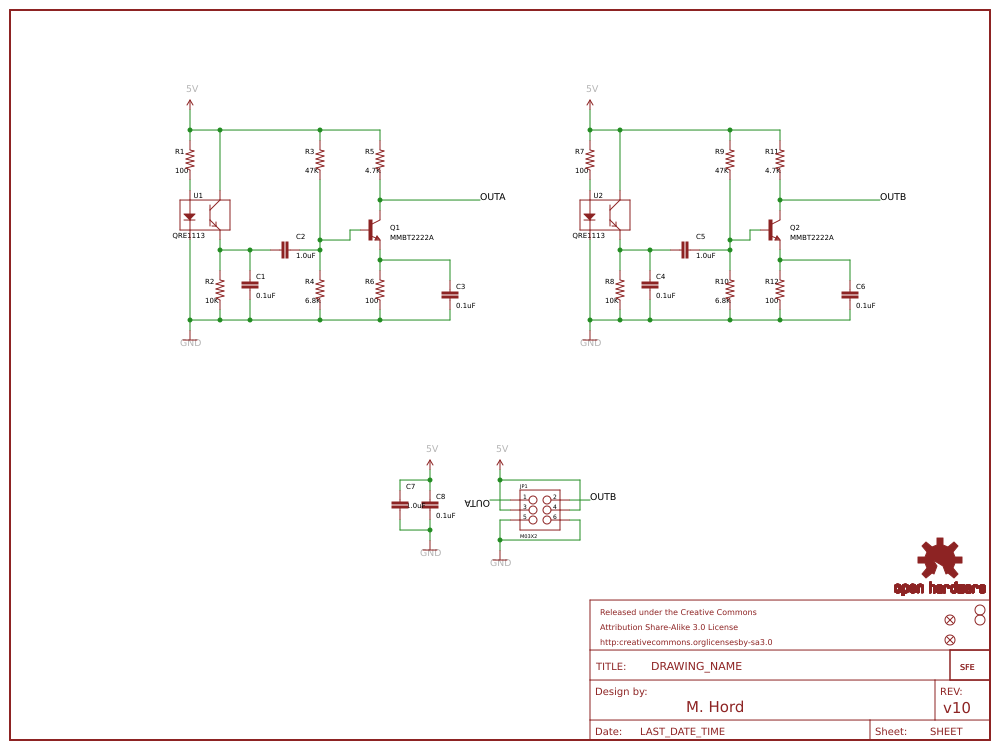
Design Drawing
schematic diagram
(
1
/
)
PCB
(
1
/
)
The preview image was not generated, please save it again in the
editor.
| ID | Name | Designator | Footprint | Quantity |
|---|---|---|---|---|
| 1 | FRAME-LETTER | FRAME1 | CREATIVE_COMMONS | 1 |
| 2 | 0.1uF | C8,C3,C6,C1,C4 | 0603-CAP | 5 |
| 3 | QRE1113 | U1,U2 | QRE1113 | 2 |
| 4 | M03X2 | JP1 | 2X3 | 1 |
| 5 | 100 | R1,R7,R12,R6 | 0603-RES | 4 |
| 6 | STAND-OFF | STANDOFF1,STANDOFF2 | STAND-OFF | 2 |
| 7 | OSHW-LOGO | LOGO3 | OSHW-LOGO-S | 1 |
| 8 | LOGO-SFENEW | LOGO4 | SFE-NEW-WEBLOGO | 1 |
| 9 | 1.0uF | C2,C5,C7 | 0603-CAP | 3 |
| 10 | 47K | R3,R9 | 0603-RES | 2 |
| 11 | 6.8K | R4,R10 | 0603-RES | 2 |
| 12 | 4.7K | R5,R11 | 0603-RES | 2 |
| 13 | MMBT2222A | Q1,Q2 | SOT23 | 2 |
| 14 | LOGO-SFE | LOGO1 | SFE-LOGO-FLAME | 1 |
| 15 | 10K | R2,R8 | 0603-RES | 2 |
| 16 | FIDUCIAL | FID1,FID2 | MICRO-FIDUCIAL | 2 |
Unfold
Project Members


 0
0
 0
0
Collect to album
Target complaint
Related Projects
Change a batch
Loading...
Add to album
×
Loading...
reminder
×
Do you need to add this project to the album?